5 minutes
Roadmap: Technology Innovation for fully autonomous car
Many cars sold today are capable of some level of automated operation.
This roadmap’s objective is to show the relevant events in technology innovation that have allowed current day features, and we will try to draw the future designs required for a fully autonomous car.
The automation of driving has several steps. We can range between the autonomous system’s levels of operation from no control (human driver has to remain in control all the time) to fully autonomous driving (the occupant is only required to set the destination).
SAE International (2014) has defined six levels of automation:
- Level 0 - No Automation: This level lack automation, although the manufacturer can install several sensing systems in the vehicle, which can provide warnings and advice to the driver. This level is implemented currently by several car companies with products such as the lane departure warning system.
- Level 1 - Driver Assistance: This level will provide some automation, such keep the speed constant with the cruise control, or activate the brake is an obstacle is detected, usually know as a collision-avoidance system.
- Level 2 - Partial Automation: This level will use different technologies developed from the previous level and combine them into new functionality. An example of such a system is adaptive cruise control (Vahidi & Eskandarian, 2003), which is an evolution of cruise control. The speed can be dynamically set by the autonomous system based on the collision avoidance system’s sensors.
- Level 3 - Conditional Automation: Until now, the driver was expected to control the steering wheel in all of our examples. At this level, we can further develop the lane departure warning system, which will control the steering wheel. This, in combination with the adaptive cruise control, has been commercialized by Tesla under the name AutoPilot. This step of automation is expected for the driver to be completely aware and intervene without notification of the autonomous system to avoid an accident.
- Level 4 - No products have been developed until the current date in this category. Still, it is expected that an autonomous system could drive and solve unexpected situations without a human driver’s intervention. When the system cannot, it should provide enough warning to the driver to return to the control of the vehicle. A possible example of such an innovation could be an autonomous driving system for motorways, transitioning from autonomous driving to human driving in the deceleration lane.
- Level 5 - All aspects of driving and solving unexpected conditions should be done with autonomous driving without a human driving intervention. This will be the end goal of the autonomous driving system.
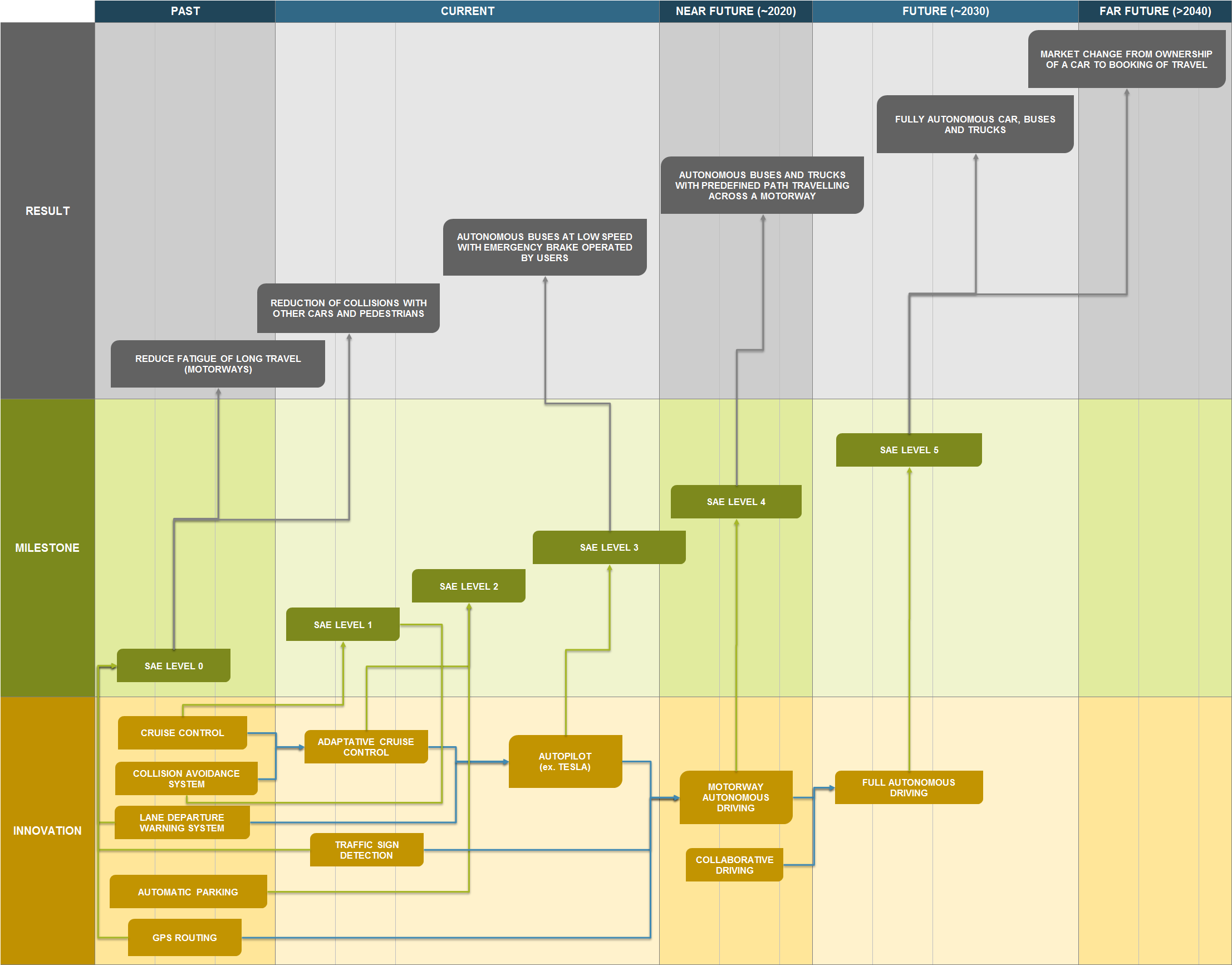
The format of program planning focuses on implementing the strategy to reach a fully autonomous driving system that can be applied to cars, buses or trucks.
This roadmap allows us to see how manufacturers can combine different products and technology developments to reach the milestones, which, in our case, matches the SAE defined levels. The milestones can be matched with an actual society need, such as reducing motorway driving fatigue, avoiding accidents with other cars or pedestrians, or minimizing people and goods’ transportation cost.
Therefore the format is divided into three parts: Innovations, Milestone, and the result or society need satisfied. With blue lines, we can see how the combination of innovations can lead to innovation. The innovation meets the requirements set by SAE International for automation levels represented with green lines. Last, in grey lines, we can see the first milestone that meets the need (or result). Further development will improve those needs, but this will over complicate the resulting roadmap.
The innovations are named by the most used familiar names, although car manufacturers for marketing reasons could change the innovation name. Nonetheless, the concept will remain unchanged.
We should understand the collaborative driving concept as the possible technology with more diffusion in the future. There is no standard, and it is quite probable that several companies develop several different technologies to meet this demand. With time, a standard will be made combining other technologies’ best ideas while keeping backwards compatibility, not to affect the diffusion rate.
The timeline shown in the map is an approximation. Even nowadays, we can see cars in the markets that do not meet all current innovations that have been developed until today, as the diffusion rate is not constant between the different innovations. The timeline is based on the SAE International (2014) paper. It is essential to note that the last step of automation or Level 5 will rely heavily on the collaborative driving idea, which means that the development of the previous step will depend upon the previous level’s diffusion rate and, therefore, the difficulty of estimating a concrete date.
Last, we wanted to explain the possible change of paradigm regarding private cars ownership that could be reached once the fully autonomous vehicle is on the market. An example could be a travel service operated by a company with a fleet of autonomous cars or small buses, where the client will require a route, and an algorithm similar to the one used nowadays by courier companies could send a shared vehicle to meet the demand of the client in an appropriate time. A more detailed study of such a case is out of the scope of this roadmap.
In the next post, I will introduce the challenges of fully autonomous driving.
References
In the next post